MRBHPC168 Awtomatlaşdyrylan Ýolagçy Hasaplaýyş Ulgamy Awtobuslarda ýolagçy akymyny takyk dolandyrmak üçin öňdebaryjy çözgüt hökmünde çykyş edýär, takyklygy we ygtybarlylygy täzeden kesgitlemek üçin ösen 3D tehnologiýasyny, berk enjamlary we akylly programma üpjünçiligini birleşdirýär. Aşakda häzirki zaman jemgyýetçilik ulaglarynyň talaplaryna laýyk gelýän gapy signalynyň açarynyň funksiýasynyň, zynjyr konfigurasiýasynyň we önüme mahsus artykmaçlyklarynyň giňişleýin beýany berilýär.

Awtobus üçin HPC168 Awtomatiki Ýolagçy Sanaw Ulgamy üçin Gapy Signalynyň Açyş Mehanizmini Düşünmek
HPC168 awtobus ýolagçylaryny hasaplaýan awtomatiki ulgam gapylar açylanda hakyky wagtda işjeňleşdirilmegini we ýapylanda bökdençsiz öçürilmegini üpjün edýän, hasaplama mehanizmi üçin möhüm tetikleýji hökmünde gapy signalynyň açaryny ulanýar. Açary ýönekeý adaty açyk (NO) konfigurasiýasynda işleýär, bu ýerde:
* IO2 öňünden energiýalandyrylanulgamyň DC elektrik üpjünçiligi (12–36V) tarapyndan weIO1 giriş terminaly hökmünde hyzmat edýärgapynyň açar signaly üçin.
* Awtobusyň gapysy açylanda, açar ýapylýar we IO1-i IO2-e birikdirýär. Bu IO1-e energiýa berýär we HPC168 enjamyna ýolagçylary hakyky wagtda sanap başlamagy üçin signal berýär.
* Tersine, gapy ýapylanda, açar açylýar we IO1 bilen IO2 arasyndaky baglanyşygy kesýär. IO1 toguny ýitirýär, bu bolsa ulgamyň sanamagy bes etmegine sebäp bolýar.
Bu mehanizm hasaplamagyň gapylaryň işleri bilen berk sinhronlaşdyrylmagyny üpjün edýär we daşamak wagtynda gereksiz işjeňleşdirmelerden ýüze çykýan ýalňyşlyklaryň öňüni alýar.
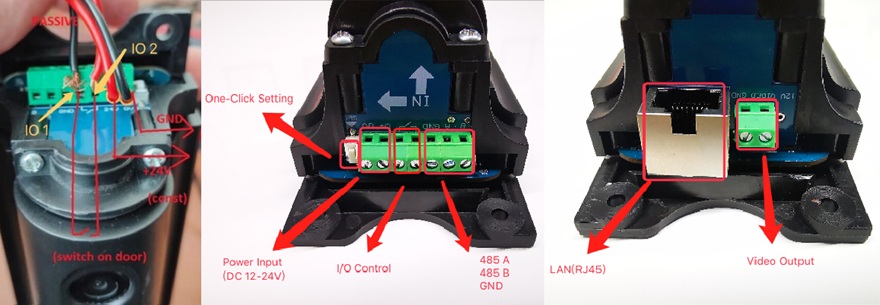
HPC168 Gapy Signal Integrasiýasy üçin Zynjyr Gurluşygy
Gapy signalynyň açar zynjyryny ornaşdyrmak üçinHPC168 awtobus ýolagçylaryny sanaýan awtomatiki kamera,şu gurluşly ädimleri ýerine ýetiriň:
1. Elektrik üpjünçiliginiň konfigurasiýasy
* HPC168 awtobus ýolagçylarynyň hasaplaýjysynyň elektrik giriş terminallaryny durnukly DC 12–36V çeşmesine birikdiriň (15% -e çenli woltly üýtgemelere ýol berilýär).
* Päsgelçiligiň öňüni almak üçin topraklama (GND) terminalynyň awtoulagyň elektrik topraklamasyna ygtybarly birikdirilendigine göz ýetiriň.
2. Gapy açarynyň simleri
* Goragly kabelleri HPC168 enjamynyň IO1 we IO2 terminallaryna geçiriň.
* Gapy açar kabeliniň bir ujuny IO1-e, beýleki ujuny bolsa IO2-e birikdiriň. Açary gapy açylanda ýapylyp, ýapylanda açylmagy üçin şina gapysynyň mehanizmine gurnalmaly.
* Wolt bilen utgaşyklylyk üçin, gapynyň signal girişi 8–36V kabul edýär, bu bolsa ony köp awtobus gapysy ulgamlary bilen utgaşykly edýär.
3. Sistemanyň integrasiýasy we synagdan geçirilmegi
* Gurnama gurşawyna esaslanyp, sensor parametrlerini optimizirlemek üçin HPC168 ýolagçy hasaplaýjysynyň bir gezek basmak bilen awtomatiki kalibrleme funksiýasyny ulanyň. HPC168 awtobus adam hasaplaýjysyna mahsus bolan bu aýratynlyk, beýikligi (1.9–2.2m) we gapynyň giňligini (≤1.2m) awtomatiki sazlamak arkaly gurnamany ýeňilleşdirýär.
* HPC168 awtobus ýolagçylaryny sanamak ulgamynyň displeýiniň ýa-da birikdirilen monitorynyň açyk ýagdaýlarda "SANAÝAN" we ýapyk ýagdaýlarda "GARAŞMA" registrini bellige alýandygyny barlap, gapyny açyp-ýapmak arkaly zynjyry synagdan geçiriň.
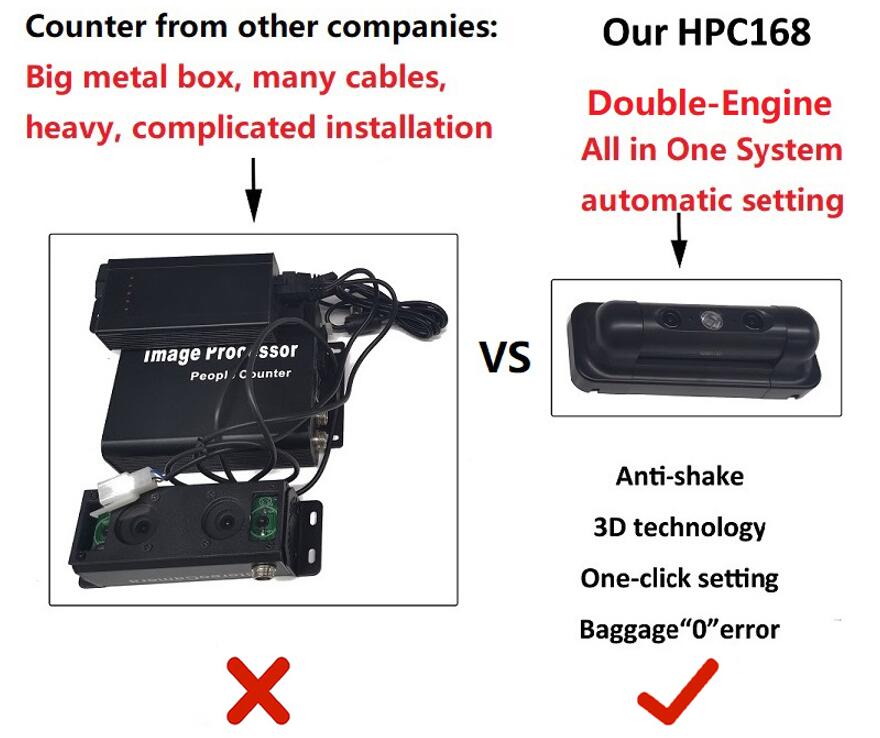
HPC168 önüminiň artykmaçlyklary Gapy signalynyň funksiýasyny güýçlendirmek
HPC168 awtomatiki ýolagçy hasaplaýyş ulgamy Ösen aýratynlyklary bilen gapy signallarynyň integrasiýasyny ýokarlandyrýar:
* 3D Çuňluk Algoritmi we Iki Kameraly TehnologiýaÖzbaşdak işlenip düzülen 3D çuňluk modeli ýolagçylaryň profillerini dinamiki usulda anyklaýar we hatda bir wagtyň özünde münmek ýa-da düşmek wagtynda hem takyk sanamagy üpjün edýär. Bu tehnologiýa ýokary öndürijilikli çip bilen utgaşdyrylanda 95% -den gowrak takyklygy üpjün edýär (gözegçilik edilýän gurşawlarda 98% -e çenli).
* Daşky gurşawa çydamlylykIçinde gurlan silkme garşy we ýagtylyga garşy algoritmler, şeýle hem awtomatiki infragyzyl goşmaça yşyklandyryş, ähli yşyklandyryş şertlerinde (0,001 lýuksdan 100 kluksa çenli) we howa şertlerinde yzygiderli işlemegi üpjün edýär.
* Ýeňil we howpsuz dizaýnABS plastik örtügi (248g, bäsdeşlerden 70% ýeňil) ýolagçylaryň çaknyşmagynyň öňüni almak üçin tegelek gyralara eýedir, gizlin simler bolsa berkligi ýokarlandyrýar.
* Köpugurly interfeýslerRS485, RJ45 we wideo çykyşlary GPS, POS ulgamlary ýa-da MDVR bilen hakyky wagt maglumatlaryny hasaba almak we wideo ýazgy etmek üçin üznüksiz integrasiýany üpjün edýär. Mugt API-ler/protokollar (RS485/RS253, Modbus, HTTP) ulgamyň ýörite integrasiýasyny goldaýar.

Operasiýa ygtybarlylygy we tehniki aýratynlyklary
* Energiýa sarp edilişi: 3.6W (ulag ulanyşynyň uzak möhletli bolmagy üçin pes energiýa sarp ediji dizaýn).
* MTBF: Elektromagnit utgaşyklylyk we ýer titremesine garşylyk üçin QC/T 413 standartlaryna laýyk gelýän, 5000 sagatdan gowrak näsazlyksyz iş.
* IP43 goragy: Tozan we suw çüwdürimlerine çydamly, içerki ýa-da daşarky gurnama üçin amatly (suw geçirmeýän örtük bilen).
HPC168 Awtomatlaşdyrylan 3D Kameraly Ýolagçy Sanaw Ulgamyjemgyýetçilik ulaglarynda netijeliligi intuitiw gapy signallaryny üýtgetmek mehanizmi we berk zynjyr dizaýny arkaly täzeden kesgitleýär. 3D tehnologiýasyny, bir gezek basmak bilen kalibrlemegi we berk enjamlary birleşdirip, gurnama we tehniki hyzmat işlerini iň pes derejä düşürip, ýolagçylaryň takyk, real wagt režiminde sanalmagyny üpjün edýär. Işleri optimizirlemek, çykdajylary azaltmak we maglumatlara esaslanýan karar kabul etmegi güýçlendirmek isleýän awtoparklar üçin HPC168 awtobus ýolagçylarynyň sanyny hasaplaýan enjam iň soňky çözgüt bolup durýar.
Ýerleşdirilen wagty: 2025-nji ýylyň 24-nji iýuny